
Between my full-time position at JPL and starting my PhD at MIT, I worked full-time at SpaceX in Starbase, TX as the RE for the Block 2 payload door structure. I iterated on the design through preliminary structural analysis using Abaqus as part of the ANSA/META FEA software package. Two doors were constructed during my time, and this rapid development was possible due to a tight feedback loop between my structural design of the door and working with mechanical design engineers for manufacturability, followed by creating work instructions for technicians to build and give feedback on, making changes as needed. My time at SpaceX was an incredibly rewarding experience that greatly contributed to my can-do attitude as an engineer and researcher.

The Jet Propulsion Laboratory (JPL) is one of NASA's research facilities, an FFRDC managed by Caltech. JPL is responsible for notable NASA missions such as Explorer 1, Mariner, Surveyor, Galileo, Voyager, the Mars Exploration Rovers, Cassini, Deep Impact, Spitzer, GRACE, and the Curiosity rover. I began my journey at JPL in March 2022 working part-time during the school year, then starting full-time in August 2023 before being laid off in April 2024.
I have spent most of my time at JPL in the Extreme Environment Robotics group (Group 347C), starting through an internship in October 2022 under Matt Gildner. Most recently, I led the mechanical efforts for a 3-week field test of the Exobiology Extant Life Surveyor (EELS) snake robot. During this field test, I was responsible for mechanical repairs and modifications, setting up electronic ground support equipment, assisting in debugging during testing, changing hardware configurations, and guiding safe transport and handling of the robot. My role also involved designing and building testbeds for the EELS project. EELS uses a set of actuated screw profiles along its length in order to move across icy terrain. I am currently building my design for a pair of parallel pivoting walls of ice in a walk-in freezer to allow for EELS vertical mobility development. I also constructed a test setup that allows for mobility screws to be tested on a block of ice with torque and force measurements collected in two axes. Finally, I made progress on a side-project formulating preliminary concepts for lunar robotic sensor packages to be sized similar to that of a Mars sample tube.
I began my internship at JPL in March of 2022 with the Nondestructive Evaluation and Advanced Actuators (NDEAA) group (Group 355N) under Yoseph Bar-Cohen. My task was to assist in the development of a proof-of-concept piezoelectric motor under the NASA STMD/MDECE task for use in extremely cold and dusty environments. A snippet of my internship can be found here.
In June 2022, I moved to the Electronics Packaging Engineering group (Group 356B) under Albert Rieck. My internship involved learning Siemens NX and performing FEA using NX NASTRAN to design an optimal pull test setup for the Atmospheric Remote-sensing Infrared Exoplanet Large-survey (ARIEL) mission under the European Space Agency (ESA). This pull test would proof test the bonds on the struts used to hold up the Focal Plane Electronics (FPE) board. I moved to 347C in October of 2022 during my senior year.

Epirus is a company that specializes in the field of counter-UAS (unmanned aerial systems) systems by way of high-power microwave radiation. The goal of the company is to counter the asymmetric threat of weaponized drones, which are cheap and relatively straightforward to build, but very difficult to counter with current solutions that depend on signal jamming, nets, or even traditional bullets. Microwaves, on the other hand, can burn the electronics inside a drone, safely disabling it with miles of range. Epirus has two flagship products: Leonidas (counter-UAS), and SmartPower (AI-driven efficient power management systems).
During my time at Epirus, I helped lead the mechanical development of an initial proof of concept for a compact wide-band waveguide chamber. I also developed a rotable shipping container that was used to transport and deliver the company's flagship product to customers safely and conveniently. Additionally, I assisted in maintaining the 3D printers and assisting those who used them, along with completing various mechanical projects to support the furthering of their counter-UAS technology. This included creating an accurate 1:25 scale model of our company’s flagship product to demonstrate functions to potential customers. Finally, I assisted in testing and repairing drones, training field representatives, and also became a certified remote pilot under the FAA.

During my time at Caltech, I was a teaching assistant for several classes with topics including HEBI robotic arms, machining, GD&T, and a robotics competition. The classes are listed below:

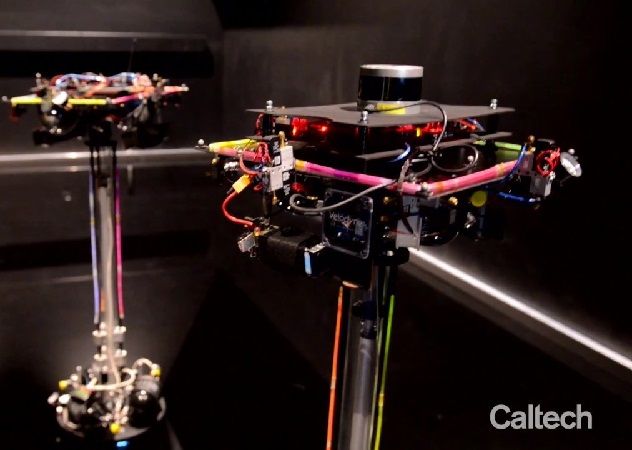
During Summer of 2020, I was a remote summer intern for CAST Robotics as a part of Caltech's Summer Undergraduate Research Fellowship (SURF) program. I was tasked with designing two systems to demonstrate fuel transfer between two 3-degree-of-freedom (3DOF) spacecraft simulators developed at CAST. This then moved into performing simulations in MATLAB. For more information, here's a link to my final presentation, and my final report. The abstract for my project is given below.
Satellites developed over the past few decades have had their functionality greatly restricted by their notably short lifespans of around five to fifteen years, often attributed to their limited fuel capacity. As a result, otherwise functional satellites get retired and thrown into graveyard orbits to then be replaced by brand new satellites. This is incredibly time-consuming, costly, and less than ideal. The aim of this project is to develop a proof-of-concept system that can demonstrate the extension of a satellite’s lifespan through in-orbit refueling. This system will be designed around the spacecraft simulators developed at the Center for Autonomous Systems and Technologies lab at Caltech. A compatible fuel arm is designed in SOLIDWORKS, then an expression for a time-dependent moment of inertia tensor is derived based on the flow of fuel from one spacecraft to the other and simulated in MATLAB. This, and similar simulations, will allow for the spacecraft controller boards to take the changing moment of inertia into account for precise movement control. Further work would consist of building proof-of-concept systems for other areas of autonomous servicing, such as replacing parts on a satellite or adding components to it to expand its capabilities.
Starting on July 2018, I took a 7-week-long internship at IBM Poughkeepsie. I worked in building 706 in the SSD/Flash/Memory Development lab using 3D Printing, CAD Design, and electronic circuits to aid in the testing of SSD/Flash/Memory modules. I worked on various projects throughout my internship that would each, in some form, be used to improve the testing method of these modules. During my time there, I picked up many technical skills and learned to work in a true workplace environment. Along the way, I refined many professional "soft" skills in addition to meeting many great people who taught me all sorts of intersting things. At the end of it all, I gave a brief 6 minute presentation and won the Inventor/Innovation award. Here's a link to my final evaluation from my supervisors Tsung Yeung and Steven Wilson (Opens in new tab).


I worked in building 705, where I used 3D Printing to aid the testing and development of SSD's, flash, and memory.


The first day of the internship consisted of setting up our laptops and becoming familiar with our offices.
I worked with my supervisors Tsung Yeung (Left) and Steven Wilson (Right). My office was in the flash development lab.
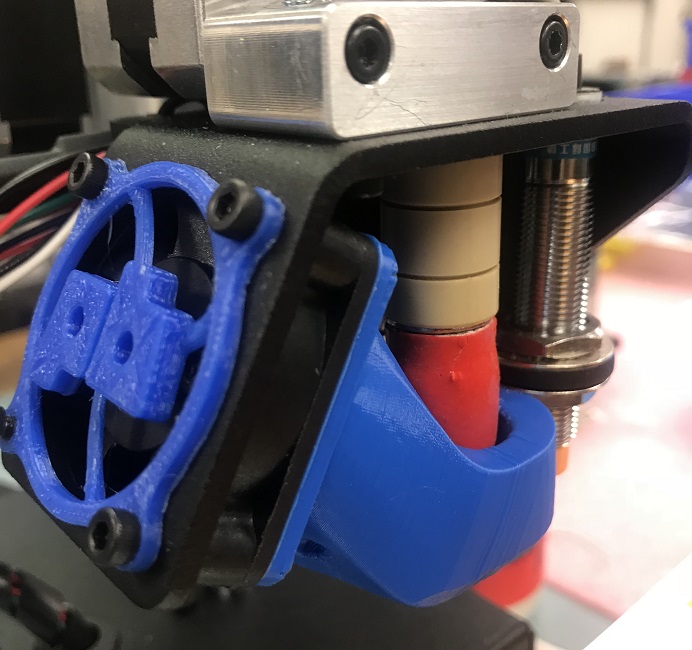
One of the first things I did was to use the Printrbot 3D printers to print upgrades for themselves (better fan shroud, better cooler, strain relief)
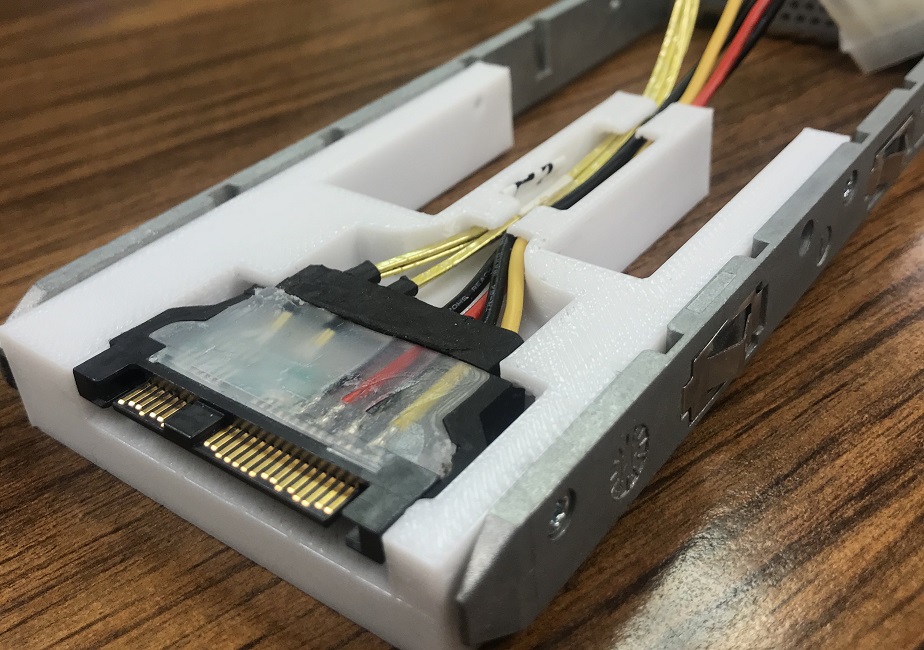
My first major project was to improve the design of a drive block fixture that allowed the use of a cable instead of an actual drive for testing.
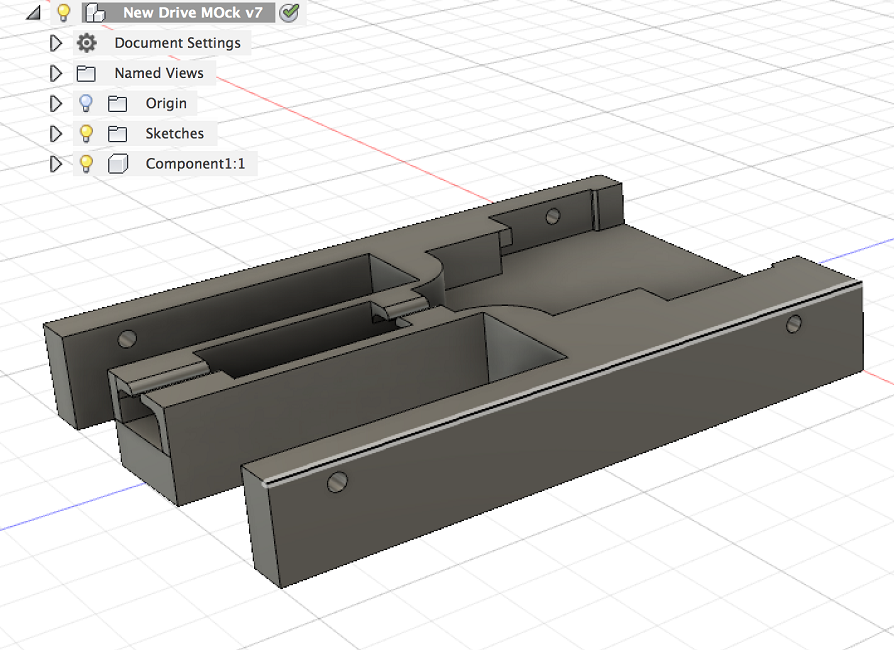
I used Autodesk Fusion 360 for my CAD 3D Modelling. Here's the 3D model file (STL Format). The projected design time was 2 weeks; The model was done by the end of the first week.
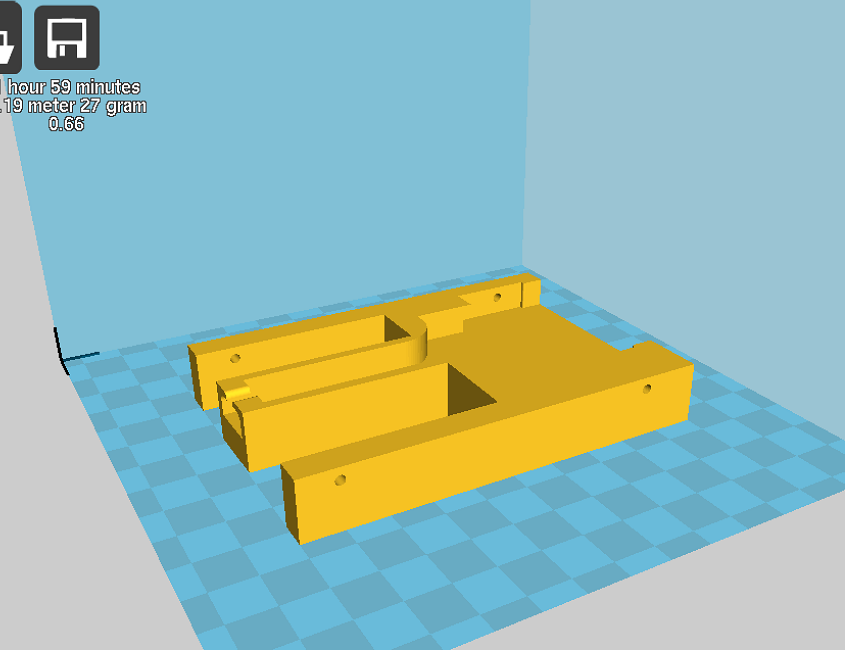
In order to actually print the 3D Models, I used a slicer program called Cura, by Ultimaker. A slicing program converts the 3D STL file to machine language that the 3D printer can actually understand.
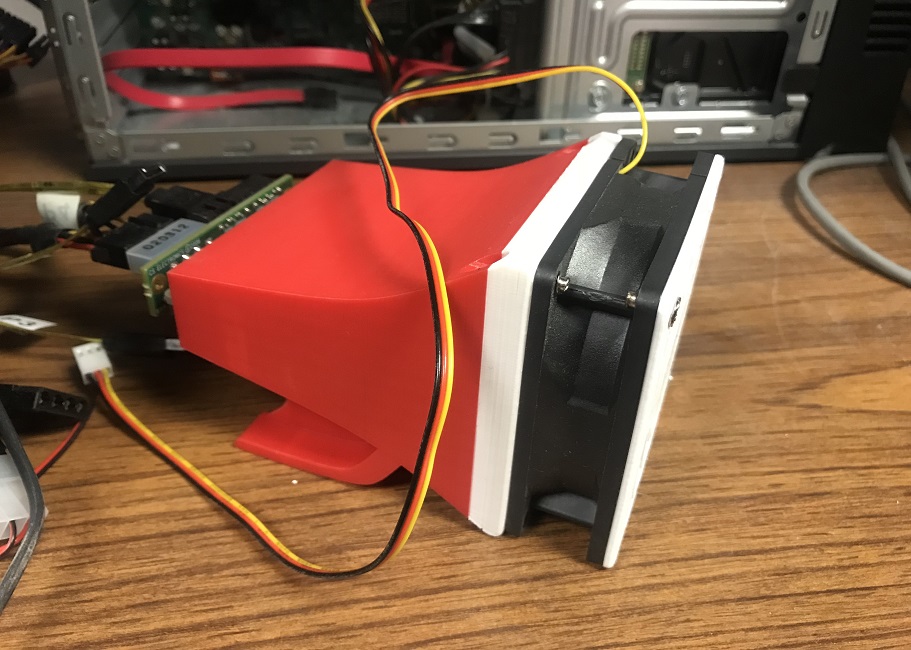
My next major project was a cooling fixture for Solid State Drive (SSD) testing. This was important as it is best practice to keep computer components at an appropriate temperature.

For some context, here was the previous cooling setup.
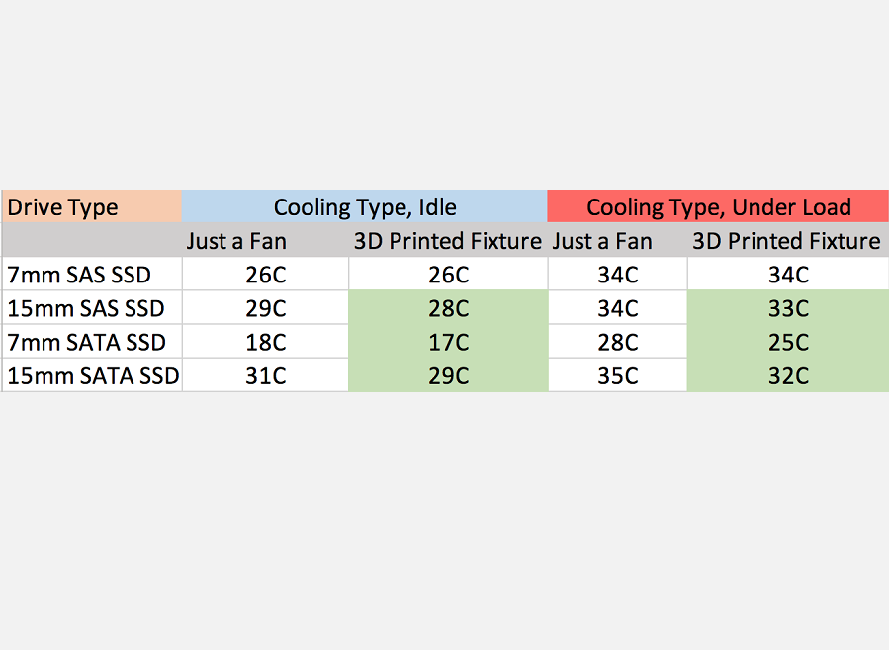
Here's a graph showing the difference between the old and new cooling setup.
Eventually I branched off into electronics. I learned how to write schematics and apply Ohm's law calculations to create a relay box that could power on/off two power supplies independently.
I also designed and 3D printed a casing for it.

One of my later projects was an overhead cooler for PCIe storage drives. This was quite the design challenge as the cooler had to not interfere with the insertion and removal of the drive, not interfere with other parts of the case, and be printed in small parts. It turned out great!

On the final day of the internship, I gave a 6-minute presentation discussing my experience and what I learned. Shortly after, I was given the Inventor/Innovation Award.